|
I am a Postdoctoral Researcher at the University of Chicago, working with Assistant Professor Rana Hanocka. I did my PhD in Electrical Engineering at Tel Aviv University with the guidance of Professor Shai Avidan. During my PhD, I interned at Google Research, where I worked with Michael Rubinstein. I am a passionate researcher who seeks creative solutions to new problems and innovative applications. My research is focused on developing artificial intelligence for geometry processing, spanning the fields of computer vision, computer graphics, and machine learning. Email / CV / Google Scholar / Github / Twitter |

|
|
|

|
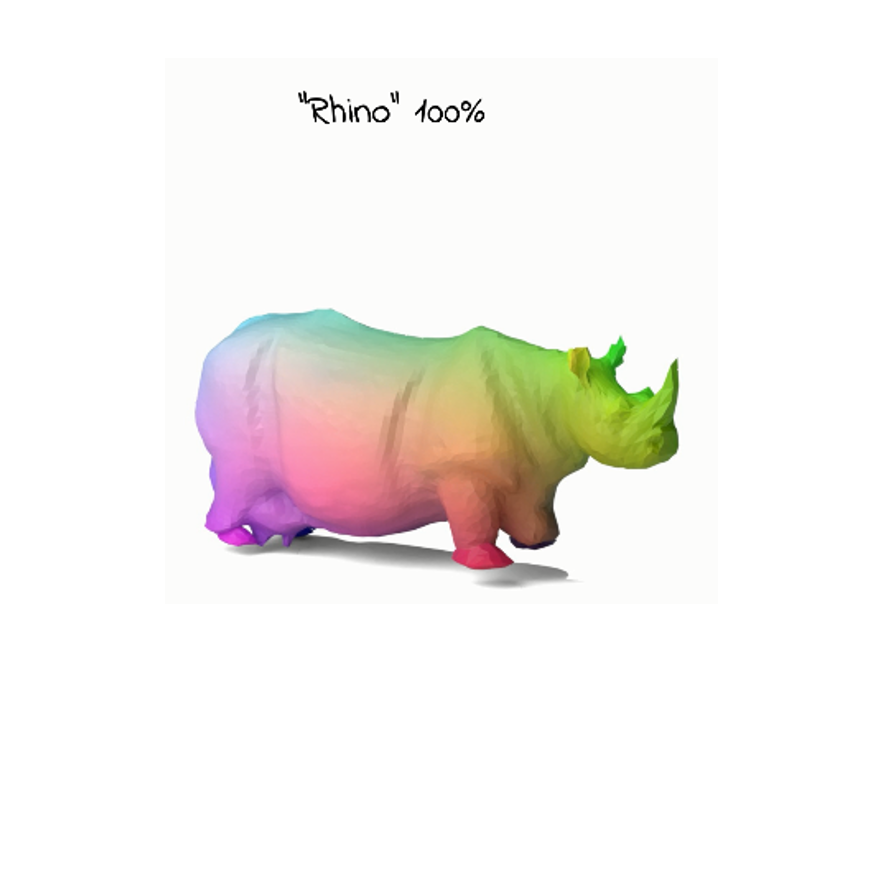
Nam Anh Dinh, Itai Lang, Hyunwoo Kim, Oded Stein, Rana Hanocka CVPR 2025 project page / paper / code Geometry in Style produces an identity-preserving stylization of mesh geonetry by deforming the surface normals of the input shape. |
|
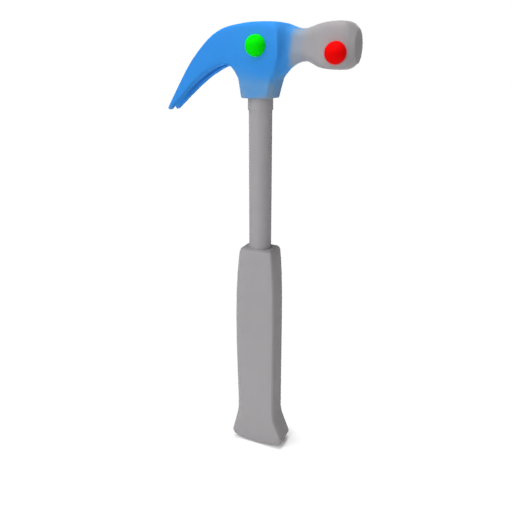
Hyunwoo Kim, Itai Lang, Thibault Groueix, Noam Aigerman, Vladimir G. Kim, Rana Hanocka 3DV 2025 (Best Paper Honorable Mention) project page / arXiv / code MeshUp deforms a 3D mesh into multiple concepts specified by text, images, or other meshes, while enabling to control the strength and location of their manifestation. |
|
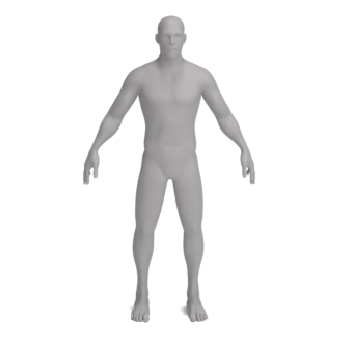
Itai Lang, Fei Xu, Dale Decatur, Sudarshan Babu, Rana Hanocka SIGGRAPH Asia 2024 project page / arXiv / code We propose an interactive segmentation technique for 3D shapes that produces fine-grained customized segmentations based on user clicks. |

|
Dale Decatur, Itai Lang, Kfir Aberman, Rana Hanocka CVPR 2024 project page / arXiv / video / code We generate precise localizations and highly detailed local textures on 3D shapes using text guidance. |

|
Ofek Pearl, Itai Lang, Kate Hu, Raymond A. Yeh, Rana Hanocka Computer Graphics Forum, 2024 project page / arXiv / video / code We build a procedural program with an interpretable parameter space to recover a high quality and easily manipulated mesh from a point cloud or a sketch input. |
|
Dale Decatur, Itai Lang, Rana Hanocka CVPR 2023 (Highlight Presentation) project page / arXiv / video / code We synthesize colors over a 3D shape and use CLIP supervision to localize semantic regions using open vocabulary text prompts. |
|
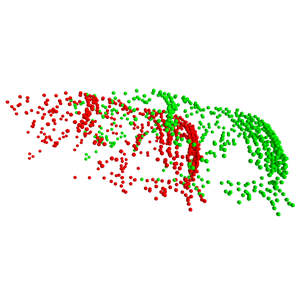
Itai Lang, Dror Aiger, Forrester Cole, Shai Avidan, Michael Rubinstein CVPR 2023 project page / arXiv / video / code We use pure correspondence learning and direct refinement optimization to predict a highly accurate scene flow while using a fraction of the training data. |
|
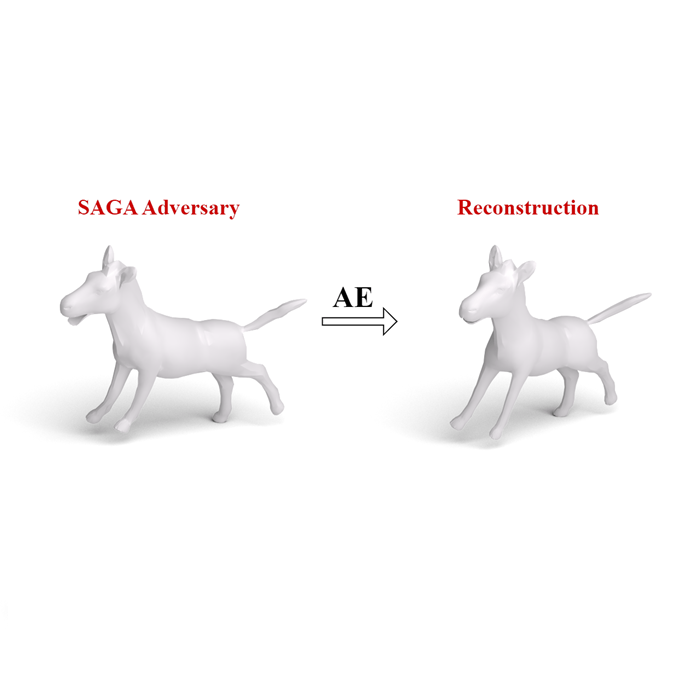
Tomer Stolik*, Itai Lang*, Shai Avidan (*Equal contribution) ICCV 2023 project page / arXiv / code We apply a low frequency perturbation in the spectral shape domain to alter the reconstruction by a victim mesh autoencoder to a desired output geometry. |
|
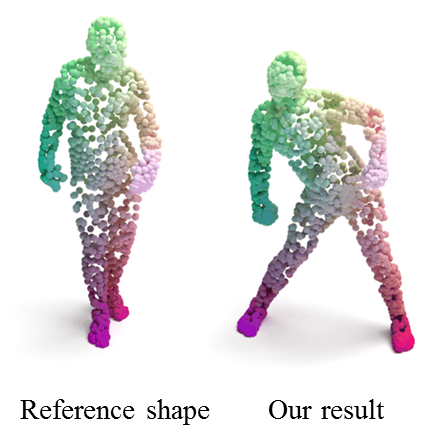
Itai Lang*, Dvir Ginzburg*, Shai Avidan, Dan Raviv (*Equal contribution) 3DV 2021 arXiv / video / code We use latent similarity and the point coordinates themselves to construct one point cloud by the other and achive an accurate dense matching with a small training data amount and without any correspondence supervision. |
|
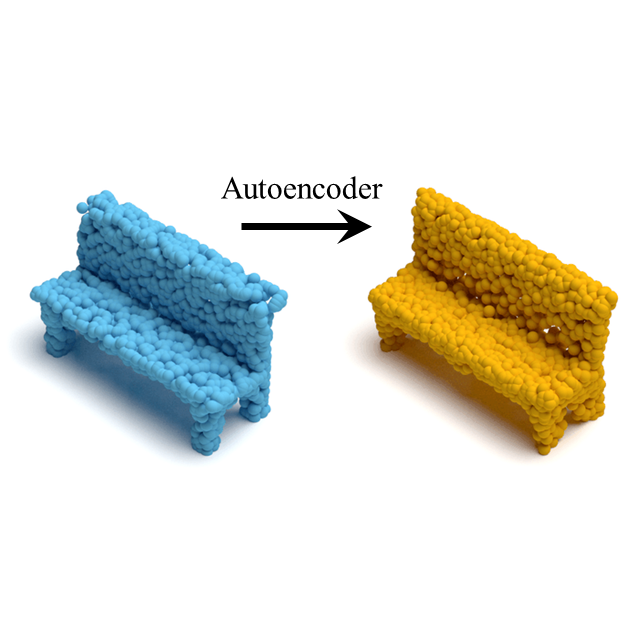
Itai Lang, Uriel Kotlicki, Shai Avidan 3DV 2021 arXiv / video / code We perturb an input point cloud to attack an autoencoder model and change the reconstructed geometry to a different selected target shape. |
|
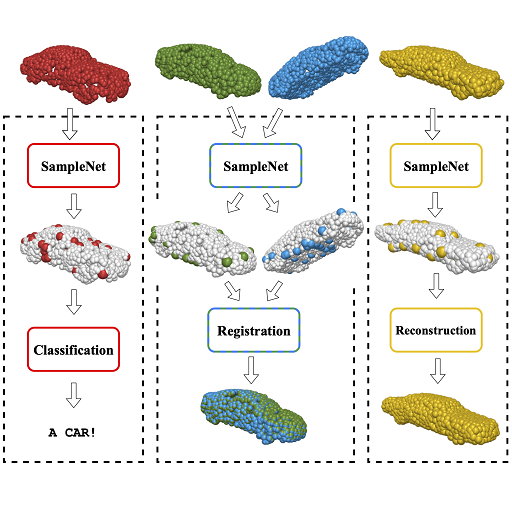
Itai Lang, Asaf Manor, Shai Avidan CVPR 2020 (Oral Presentation) arXiv / video / code We propose a differentiable relaxation to the sampling operation that enables learning a task-oriented sampling model in an end-to-end manner. |
|
Oren Dovrat*, Itai Lang*, Shai Avidan (*Equal contribution) CVPR 2019 arXiv / code We propose a data-driven sampling approach for 3D point clouds that selects the most suitable subset of points for a downstream task. |
|
|
|
Topics in Machine Learning: 3D Geometry Processing and Computer Vision with Deep Neural Networks CMSC 35401 Winter 2024 University of Chicago Teaching Assistant Computer Vision 0510-6251-01 Fall 2024 Tel Aviv University Lead Lecturer |
|
|
|
Meta Reviewer: International Program Committee, SGP 2025 Area Chair, WACV 2025 Judge, SIGGRAPH 2024 Student Research Competition Poster Juror, SIGGRAPH 2024 Poster Program Conference Reviewer: SIGGRAPH 2025 CVPR 2025 ICLR 2025 3DV 2025 SIGGRAPH Asia 2024 Graphics Replicability Stamp Initiative 2024 SIGGRAPH 2024 CVPR 2024 SIGGRAPH Asia 2023 CVPR 2023 (Outstanding Reviewer) SIGGRAPH 2022 CVPR 2020 Journal Reviewer: TPAMI TVCG TCSVT CAG |
|
This webpage was adapted from Jon Barron's webpage. We thank Jon Barron for sharing his source code. |